想学ros仿真来着,就把turtlebot3和几个项目裁剪了一下,在之前的A * 、Bspline基础上搞了一下,其实一开始是想搞cleanRobot内个项目的,大致框架也是跟那个项目一样,不过我还没把BCPP加进去,主要是BCPP还没看完,因为东西太多了很多地方懒得看,拖了一两个周了,现在先把这部分草草结束吧。
整个工程很多地方都有bug,但是已经懒得改了,之后加BCPP的时候估计会修一下,而且后续计划是把Move_base的DWA替换为自己的包,估计到时候是个大工程
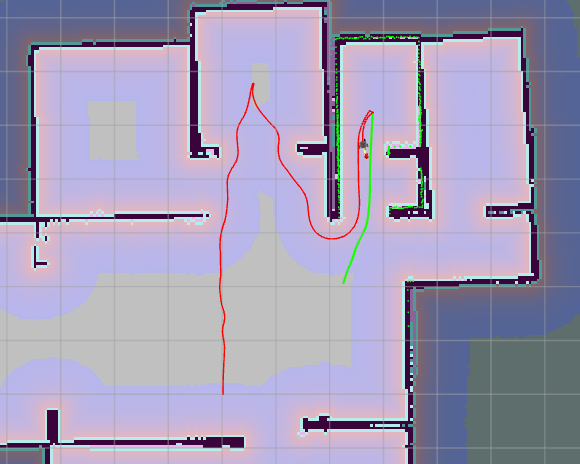
先上效果:
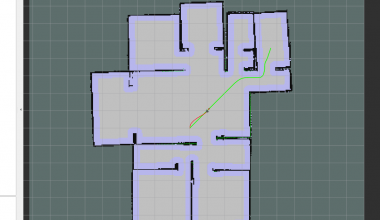
在rviz选定target后,先规划出一条路径,然后机器人跟着过去,下面有个视频可以看看
2024-09-27 16-06-01
代码端基本就用到这么几个:
src
│ ├── Astar.cpp
│ ├── Bspline.cpp
│ ├── main_Bspline.cpp
│ ├── minimum_control.cpp
│ ├── next_goal.cpp
│ ├── OccMapTransform.cpp
│ └── pathplanner.cpp
用法和以前一样
catkin_make
source devel/setup.bash
roslaunch path_plan clean_work.launch在rviz中选择一个2D Nav Goal就好
代码放gitee上了
https://gitee.com/upcgyl/my-clean-robot.git
自取