Turtlebot3项目:
启动虚拟环境(gazebo):
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch turtlebot3_gazebo turtlebot3_world.launch
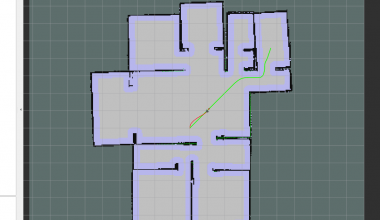
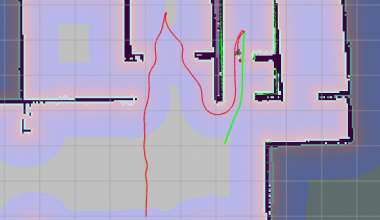
读取地图并运行导航程序
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/gyl/桌面/VMWorks/catkin_turtlebot3/src/turtlebot3-master/turtlebot3_navigation/maps/map.yaml
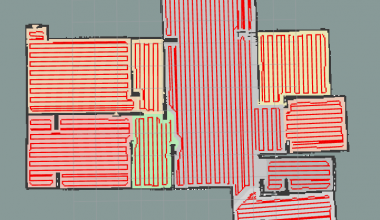
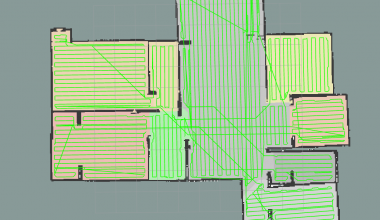
Clean-robot-turtlebot3项目:
- 修改world和map文件为自己的虚拟环境
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch clean_robot clean_work.launch map_file:=/home/gyl/桌面/VMWorks/clean_robot_ws/src/clean_robot/maps/map.yaml
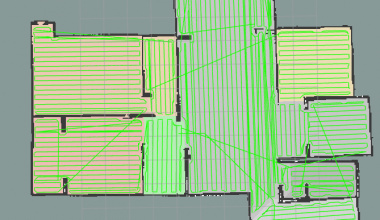
My-turtlebot3项目
(顾名思义,就是我自己的项目……)
- catkin_make
- source devel/setup.bash
- export TURTLEBOT3_MODEL=burger
- roslaunch path_plan clean_work.launch