<编辑中> 一口气看完路径规划 ,耗时85642687分钟制作,全程无尿点。友情提示:备好零食,连接WiFi
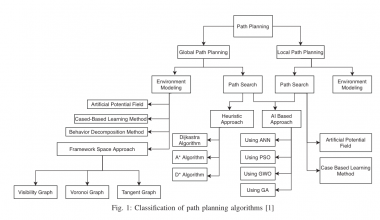
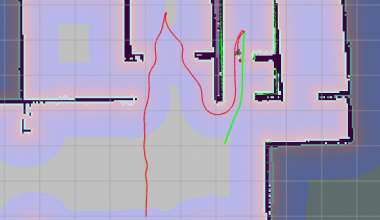
【本文仅用作笔记和回顾】 一、前言 以无人驾驶车领域为例介绍全局路径规划和局部路径规划: (一)全局路径规划:全局路径规...

【本文仅用作笔记和回顾】 一、前言 以无人驾驶车领域为例介绍全局路径规划和局部路径规划: (一)全局路径规划:全局路径规...

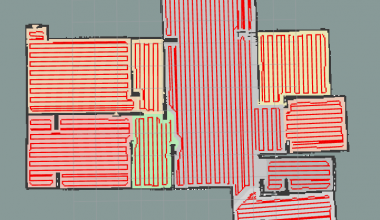
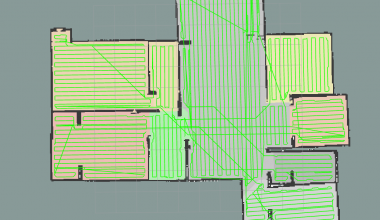
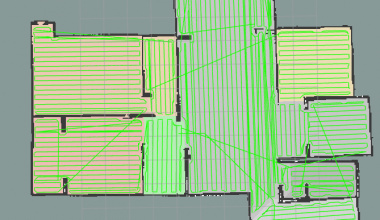
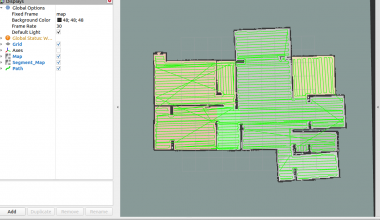
牛耕覆盖路径算法 [ BCPP ] 实现效果: 覆盖算法所需前置数据: map_origin:地图原点,表示地图左上角的...