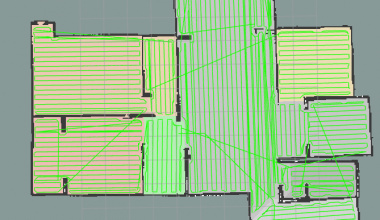
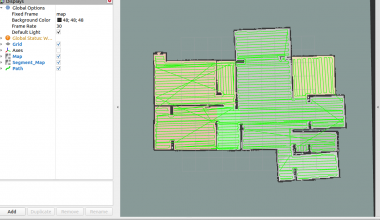
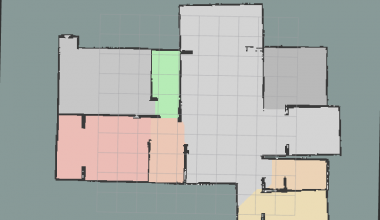
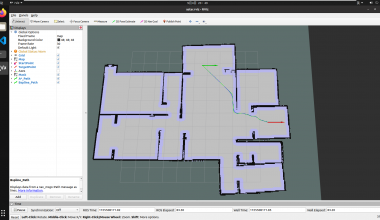
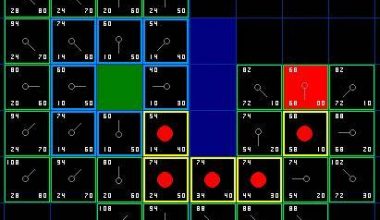
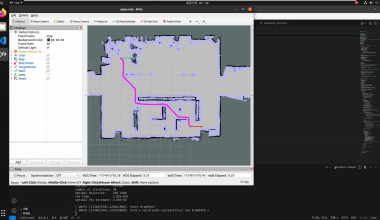
牛耕覆盖算法 Boustrophedon Coverage Path Planning
牛耕覆盖路径算法 [ BCPP ] 实现效果: 覆盖算法所需前置数据: map_origin:地图原点,表示地图左上角的...



X